En los trabajos de afirmado hoy día se emplean muchas tecnologías que, desde hace bastantes años, son de un uso tan común que puede llegar a parecer que siempre han estado ahí, no resultando fácil concebir
como se podrían construir los firmes y los pavimentos sin ellas.
Si nos
preguntásemos de dónde vienen, cómo se generaron y cuáles son los antecedentes de algunas de esas técnicas tan usuales, y cómo se ha ido llegando a la metodología actualmente empleada en los trabajos de
pavimentación, podríamos recorrer un
camino muy curioso, retrocediendo a través del tiempo en busca de los ancestros
de esas tecnologías y sus imágenes.
Algunas de las etapas de ese
camino, en busca de unas cuantas técnicas primigenias y su evolución se irán,
poco a poco, esbozando en este blog, comenzando en este artículo con la de la nivelación y perfilado de las explanadas y capas de firme.
 |
Niveladoras: Casi siglo y medio las separan
|
Perfilado
y nivelación
Hoy día
las motoniveladoras son tan ampliamente utilizadas en la construcción y
mantenimiento de carreteras y en otras actividades que no nos imaginamos trabajos de
perfilado sin ellas. Pero estas máquinas han recorrido un largo camino, desde las
primeras que se inventaron en el siglo XIX, movidas con tiros
de mulas o caballos, hasta las actuales, de alta precisión con tecnología 3D. He aquí algunos apuntes sobre su génesis.
Niveladoras con tiro de una o varias parejas de caballos o mulos
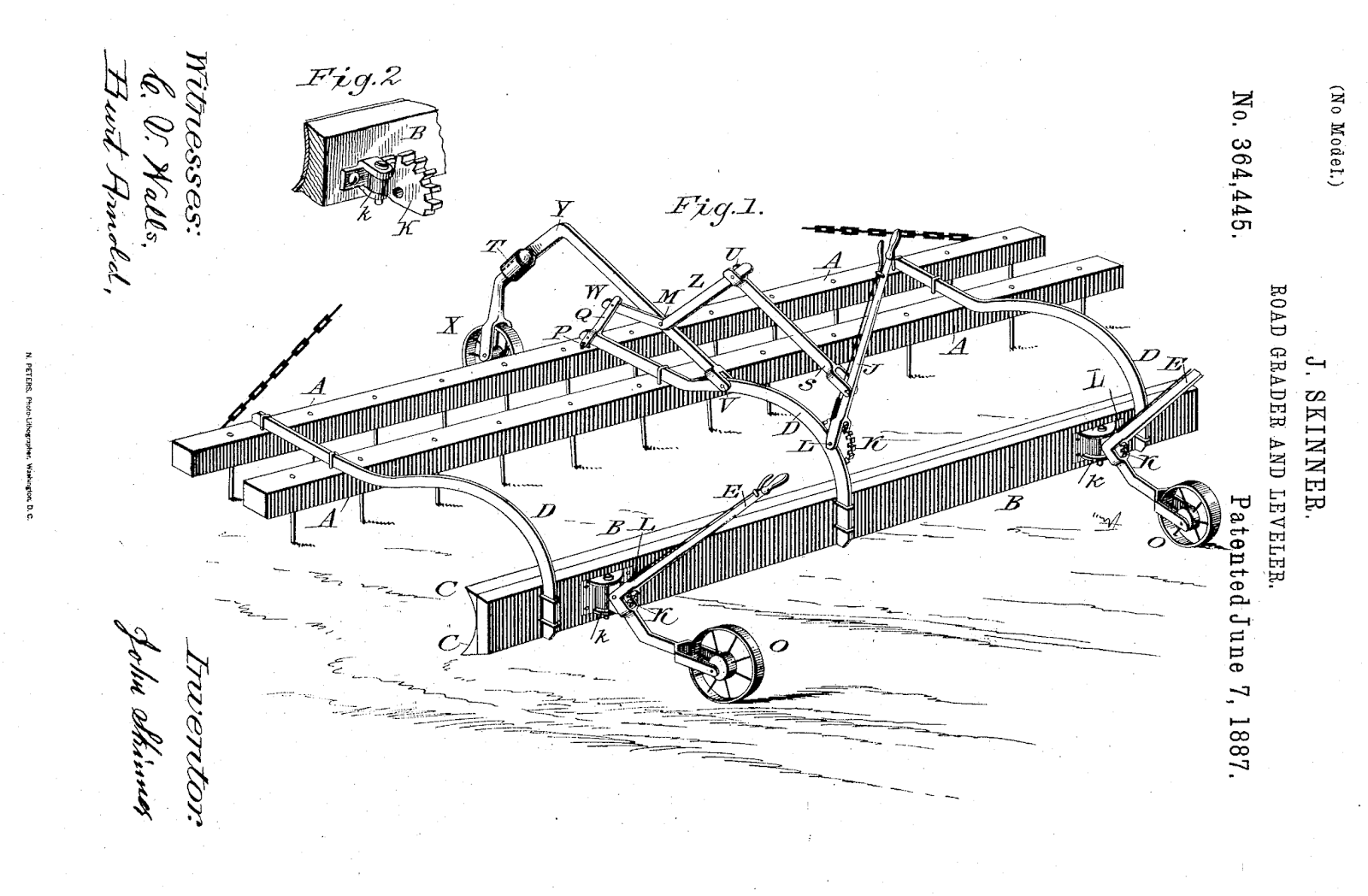
El último cuarto del siglo XIX fué fértil en inventos de artilugios para simplificar los trabajos de perfilado y nivelación de las carreteras y caminos, tratando de superar las gradas de arrastre que se venian utilizando, en especial en los reperfilados para el mantenimiento de los abundantes caminos y carreteras en tierra, aunque muchos sólo consistían en barras con dientes para escarificado y una cuchilla para perfilado como el "Road grader and leveler", patentado por J. Skinner en 1887 (Fig 1)
 |
| Fig 1. Road grader and leveler. 1887 |
Uno de
los intentos pioneros de aquella época para el rasanteo de las carreteras y caminos es el representado en la (Fig 2), de la firma Austin-Western,
que data de alrededor de 1880. En ella el operador disponía de largas
palancas con las que cambiaba la posición de la cuchilla, ya dispuesta de modo inclinado, para desplazar el material sobrante.
 |
| Fig 2 - Niveladora de Austin Western |
Sin embargo, la que se puede considerar como la primera niveladora, el verdadero antecedente de las actuales, ya se había generado con anterioridad y fué debida a Samuel Pennock, cuya empresa familiar fabricaba maquinaria agricola y que se convirtió en uno de los pioneros o visionarios en la mecanización de las obras de carreteras. En 1875 había presentado su "Road-scraper", cuya patente obtuvo en 1877, un antecedente de niveladora-escarificadora (Fig 3), con una hoja, situada con un ángulo fijo respecto al bastidor triangular, que podía reglarse en altura e inclinación y en la que los dientes de escarificado situados delante de la cuchilla también podían regularse u ocultarse; este bastidor se conectaba a un remolque de tiro de caballos.
 |
| Fig 3. Los dibujos de la patente de la Road-Scraper de Samuel Pennock |
y resulta curiosa la publicidad que empleaba, haciendo hincapié en los beneficios de las mejoras en las carreteras (Fig 4).
 |
| Fig 4 |
Pero la verdadera revolución, por la que Samuel Pennock es conocido, la supuso la evolución que presentó dos años más tarde, en 1877, con un bastidor sobre cuatro ruedas, con las posteriores de mayor diámetro para poder pisar en la cuneta, dotando a la hoja o cuchilla de todos los movimientos o ajustes posibles, pudiendo modificarse su ángulo horizontal y su inclinación; también podía desplazarse lateralmente el chasis. (Fig 3). Este equipo, que denominaron "American Champion", dió origen a la línea de niveladoras Champion, conocidísima marca de motoniveladoras que perdura hoy día. (Fig. 5)
 |
| Representación de la American Champion de 1877 |
 |
Champion Big Winner nº 31 (1886)
Fig 5 Niveladoras Champion de S.Pennock |
En estos primeros desarrollos, las ruedas tenían una
geometría fija respecto al bastidor, lo que introducía dificultades e inestabilidades
en superficies muy inclinadas y no era muy útil en cunetas y taludes. Para
resolverlo, unos pocos años después, en 1885, J.D.Adams patentó la "Road grader machine", que se puede considerar ya
como una verdadera niveladora, en la que la cuchilla se fijaba al chasis, pero las
ruedas eran inclinables , con lo que podían apoyarse con más seguridad en los
taludes y contrarrestaban los empujes transversales debidos al esviaje de la hoja. La llamaron “Little Wonder” y ese principio de ruedas inclinables, la
enlaza directamente con las motoniveladoras actuales, aunque era remolcada por
caballos. (Fig.6)
 |
| Fig .6- Little Wonder de J.D.Adams (1885) |
Un
poco después, en 1895, presentó otro modelo, el “Royal King”, de 4 cuatro
ruedas, todas inclinables y una cuchilla orientable fijada a un bastidor
giratorio. (Fig 7)
 |
| Fig 7 Adams. Royal King |
Incluso
podía quitarse la cuchilla y convertirla en un escarificador, como muestra este
anuncio de la compañía (Fig 8).
 |
| Fig 8 |
El enorme salto en productividad de las máquinas tiradas por uno o varios grupos de caballos, hizo que se impusiesen con rapidez en la construcción y mantenimiento de carreteras y caminos. Proliferaron múltiples desarrollos, que progresivamente se iban basando en las ruedas inclinables, que se convirtieron en un estándar, con distintas soluciones para los movimientos de la hoja.
 |
| Fig 9 . En acción, remolcadas con tiro de dos, cuatro o cinco caballos o mulas |
Niveladoras con arrastre por tractores o rodillos (a vapor o motores de combustión interna)
El desarrollo de las máquinas a vapor y su aplicación en tractores y compactadores de rodillos hizo que empezasen a sustituir al remolque con équidos, aunque el súbito incremento en la fuerza de tiro obligó a rediseñar los chasis de las niveladoras inicialmente pensadas para los menores esfuerzos del remolque equino. Se usaron tanto tractores de tiro con ruedas metálicas o incluso orugas como, frecuentemente, los propios rodillos metálicos a vapor.
 |
| Remolcada por tractor de orugas |



 |
| Fig 10- Ejemplos de remolque con máquinas a vapor |
|
|
|
|
Los fabricantes de rodillos a vapor proponían usos versátiles para su producto, entre ellos el de remolcar niveladoras y daban en sus guías de empleo indicaciones de cómo hacerlo; es el caso de la Buffalo Pitts Co (uno de los mayores fabricantes de la época) en su "Useful Hints for Buffalo Pitts Road Roller Engineers" de 1913, del que se muestran en la Fig 11, el esquema de remolque de una niveladora y también el caso de remolcado de dos.
 |
| Fig 11 Aplicación del Buffalo Steam Roller a remolque de niveladoras |
y en la siguiente vieja fotografía vemos su aplicación en el perfilado simultáneo de talud y de cuneta con dos niveladoras Adams de ruedas inclinables
 |
| Fig 12 |
La progresiva sustitución de las máquinas a vapor por las movidas por motores de combustión interna, tuvo su reflejo también en esta técnica de remolque, empleando para ello tanto tractores de ruedas u orugas como, incluso, camiones.
 |
| Niveladora Adams remolcada por un Caterpillar 30 |
 |
Adams y Cat 60
Fig 13- Ejemplos de remolque con tractor | | | | | | | |
|
|
|

 |
| Fig 14- Ejemplos de remolque con camión |
En esta gama de niveladoras remolcadas, Galion se hizo muy notoria en las décadas de 1920 y 1930 por fabricar las mayores niveladoras que eran remolcadas, también, por los mayores tractores disponibles. De hecho mantuvo los modelos remolcados hasta 1945, cuando ya las motoniveladoras autopropulsadas, aparecidas 26 años antes, eran el estándar
 |
| Fig 15 Modelo remolcable de Galion, la Galion 14 |
|
 |
| Fig 15 Una Galion 10 de 1929 remolcada por tractor en una exhibición reciente |
Motoniveladoras automotrices y la técnica actual
Una vez aparecidos los motores compactos de combustión interna, era cuestión de poco tiempo que se incorporasen a las niveladoras, simplificando los procesos de perfilado, al eliminar la máquina de tiro. Los primeros desarrollos partieron de adaptación simple a un tractor del bastidor con la hoja
Así, en 1918, aparece la que se puede considerar como primera
motoniveladora, presentada por Russell Grader Manufactoring Co, la
“Motor Hi-Way Patrol No. 1”, una motoniveladora derivada de un tractor
Allis-Chalmers. En las imágenes que siguen se muestra una adaptación a un tractor Allis Charmers en 1920 y la tercera
evolución (Patrol nº3) en la que aún se aprecia nítidamente el tractor
base.
 |
| Una Russell Junior Road Grader de 1920 movida con un Allis-Chalmers | | | | | | | |
 |
| Russell -Motor patrol nº3. | |
Fig 16 Primeras Motoniveladoras Russell
En otros equipos de la época se aprecia de un modo menos refinado, su derivada de un tractor agrícola
 |
| Fig. 17 Primeras motoniveladoras basadas en tractores agrícolas |
Poco después, en 1922, Galion presenta su modelo
C Patrol, una motoniveladora con motor trasero que incorporaba otro gran avance, el control hidráulico de sus mecanismos que había desarrollado dos años antes e incorporado a las niveladoras remolcadas. El paso del control mecánico al hidráulico supuso un gran avance para los operadores tanto en seguridad como en un menor cansancio. Este modelo configura ya bastante el aspecto definitivo de las motoniveladoras.
 |
| Fig 18 Galion C Patrol |
También J.D. Adams, en inventor de las ruedas inclinables, se incorporó en 1298 con su modelo nº10 al campo de las motoniveladoras
 |
| Fig 19- J.D. Adams Motor Grader, modelo nº10 |
La reducción, con respecto a las técnicas de máquina remolcada, de dos o tres operadores a solo uno, llegó a ser incluso motivo para que un fabricante, Wehr llamase "
One man power grader" a su modelo de los años 20, equipado con un motor Fordson de tractor (Fig 20)
 |
| Fig 20 Motoniveladora Wehr, exhibiendo lo de "One man power grader" 1920s |
Con la aparición de esos equipos autopropulsados en los años 20, ¡hace ya casi un siglo!, las motoniveladoras ya presentan una configuración básica muy próxima a la de los equipos actuales A partir de entonces, los desarrollos sucesivos se centraron en un mejor control y facilidad de manejo de la cuchilla, en más potencia y capacidad de tracción (con dobles ruedas traseras), mejor ergonomía y facilidad de control del equipo, dispositivos escarificadores independientes y abandono de las transmisiones mecánicas en favor de las hidrostáticas, hasta llegar, más recientemente, a la revolución que supuso la incorporación de automatismos en los sistemas de posicionamiento de la cuchilla, que respondían a datos externos de nivelación, bien por toma de datos con sensores ultrasónicos sin contacto de una referencia externa de nivelación física, como un cable, o de virtual como un plano suministrado desde emisores láser o, finalmente, sistemas 3-D, vía Estación total o GPS diferencial, que es la técnica actual.
 |
| Modelo de Austin con tracción con orugas |
 |
| 1920s- Sawyer Masey con motor Fordson |
 |
| 1928- Champion totalmente hidráulica |
 |
| La primera motoniveladora Caterpillar, No.4 Auto Patrol, tras adquirir Russell en 1928 |
 |
1931 Cat 9 Auto Patrol
Fig 21- Otras ejemplos de las primeras motoniveladoras |
y como colofón a este paseo a través del tiempo, viendo la evolución de las
máquinas de perfilado con los curiosos sistemas empleados desde hace más de un siglo, llegamos a las motoniveladoras actuales, que incorporan sistemas de nivelación automatizada vía GPS diferencial, como el de Trimble
incorporado a esta motoniveladora Caterpillar. (Fig.22)
 |
| Fig 22 Cat 102M con GPS |
En futuros artículos de este blog se irá tratando la génesis y evolución de otros equipos.
Siguiente articulo

{kind=link}


























































JODER QUE GUAY
ResponderEliminarExelente y profesional el artículo..
ResponderEliminarEspero tener más novedades como esta
El articulo es excelente! Felicitaciones!!
ResponderEliminarExcelente artículo, muy ilustrativo.
ResponderEliminar¡¡Felicitaciones!!